LX200 Emulator
Teleskopsteuerungen gibt es natuerlich schon lange. Allerdings sind diese erst ab ca 1000 Euro zu bekommen. Meine Loesung kostet, einmal vom Zeitaufwand abgesehen, lediglich 20 Euro.
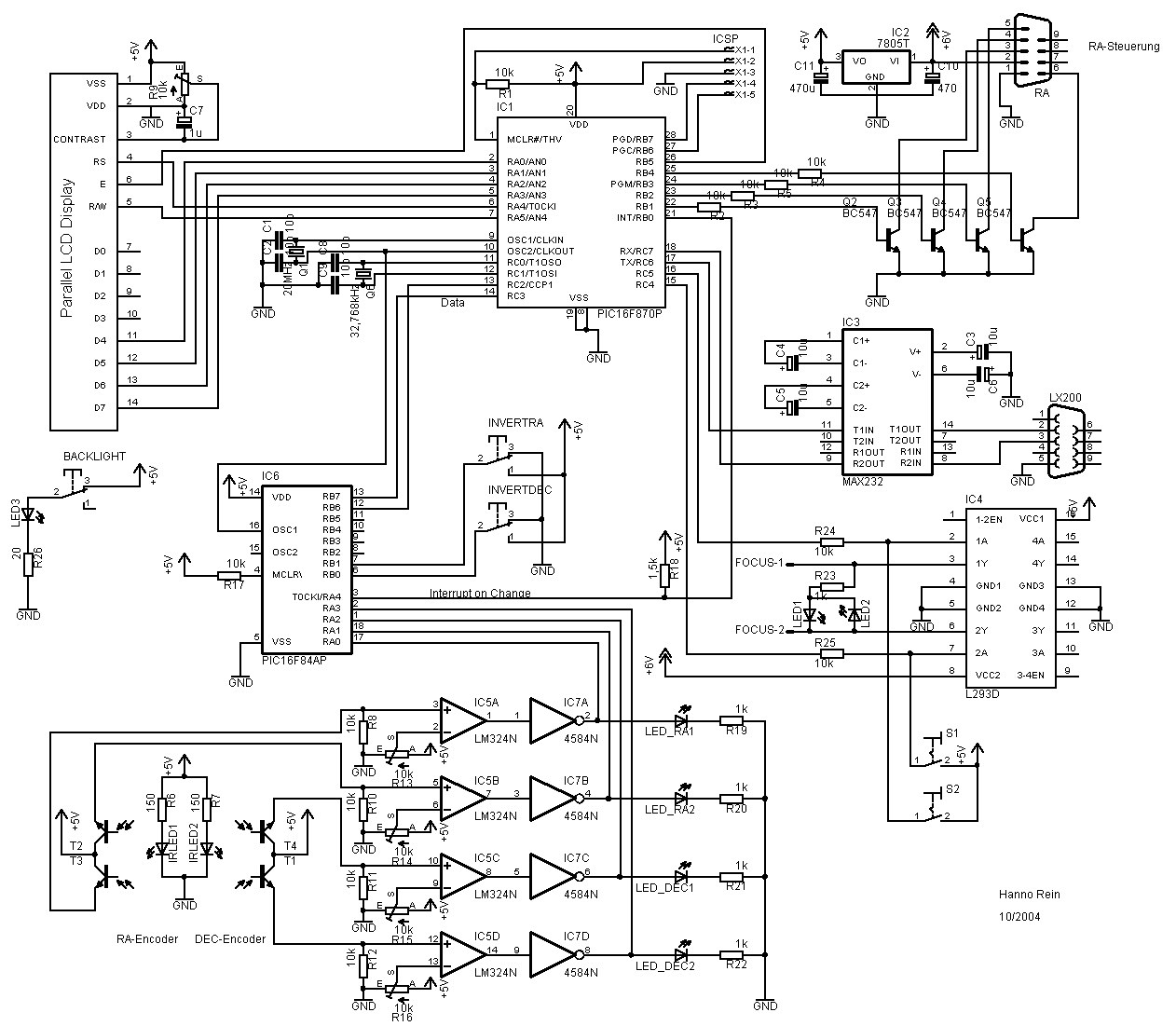
Schaltplaene
Der Schaltplan kann hier ![]() heruntergeladen werden. Ausserdem gibt es den
heruntergeladen werden. Ausserdem gibt es den ![]() Schaltplan auch noch im Eagle Format.
Schaltplan auch noch im Eagle Format.
Schaltungserklaerung:
Ich benutze zwei Microcontroller der Firma Microchip (PIC16F84A und PIC16F870), die jeweils mit 20 MHz betrieben werden.
Ein Microcontroller alleine kann kaum die parallelen Aufgaben (Winkelencoder auslesen, RS232 Kommunikation, etc) bewerkstelligen.
Durch einen zusaetzlichen Uhrenquarz mit 32.768 kHz wird ein genaues Zeitsignal erzeugt.
Mit Hilfe des MAX232 werden RS232 konforme Pegel erzeugt. Die Steuerung des RA-Motors erfolgt mit Hilfe der urspruenglichen (chinesischen) Steuerung.
Mit den Transistoren Q2 bis Q5 werden einfach die Schalter der Handsteuerung ueberbrueckt. Damit spart man sich laute und anfaellige Relais.
Der Gleichstrom-Fokusiermotor wird ueber den IC L293 gesteuert.
Die Winkelencoder sind die selben wie schon in meinem Projekt SkyMouse. Jetzt habe ich allerdings die Elektronik der Maus komplett weggelassen und diese selbstgebaut. Damit erhaelt man die Moeglichkeit die IR-Leds etwas mehr aufzudrehen und die Verstaerkung der Transistoren von Hand zu verstellen.
Der IC LM324N dient hierbei als Komparator. Durch IC7 (6-fach Schmitt-Trigger) wird ein TTL kompatibles Signal erzeugt und man verhindert, dass der Microcontroller zuviele Schritte zaehlt.
Die LEDs dienen lediglich als optische Rueckmeldung, ob der Encoder funktioniert.
Die Auswertung der 4 Signalleitungen uebernimmt der kleine PIC16F84A. Dieser sendet bei einer Bewegung einen Interrupt an den großen Bruder. Außerdem kann er durch zwei Kippschalter die Richtung invertieren.
So sieht das Innenleben der Steuerung aus. Es empfielt sich wohl eine Platine zu aetzen, aber als ich angefangen hatte, wusste ich noch nicht wie die Schaltung aussehen wird.

Software
Beide Microcontroller wurden in Assembler programmiert. Das sind inzwischen fast 2000 Zeilen Code und selbst fuer mich nicht mehr leicht zu durchschauen. Ich stelle sie trotzdem unter der GPL online. ![]() Download als ZIP-Archiv.
Download als ZIP-Archiv.
Sollte es Probleme geben, einfach melden.
Das Display zeigt die aktuelle Position des Teleskops, sowie das Target, Uhrzeit und Datum an.

Einsatz sieht das ganze dann so aus:

{kind=link}